Here are all the latest details on development of the Sixi 3 actuator.
Over the last ten years I’ve built four completely different robot arms over the last ten years. The last (and biggest) had 1300 total parts in 250 types of parts. That counts every unique screw, printed part, length of wire, crimp connector, PCB component… everything.
The Sixi 3 actuator is designed to be a single motorized LEGO block that can be repeated to build robot arms. It has less than 50 parts in about 10 types. Also! Building many little identical things is easier than building one huge unique thing.
Discord user Wted00 said “You talk about Sixi 3 a lot. What ever happened to Sixi 1 and 2?” Great question, long answer. This video covers robot arms before Sixi and then all three models of the current brand, along with interesting things learned along the way. Plus stick around for movement demos at the end.
Building a robot arm is one thing, but what about writing the code to make it run? Some people want to learn the fine points of precision stepper motor control, forward and inverse kinematics, and then debug all that stuff. For the rest, working together gets the job done faster. For those people the Marlin 3D printer firmware is a great option. Today I’m going to show how I tweaked it to run in the Sixi 3 robot arm. Please share your experience with us so we can improve this post.
Marlin?
Marlin 3D printer firmware is the code in the brain of a very large number of printers. It is very flexible with a few changes. Most people might think of printers as having four motors – one for each direction and one for the extruder. But recent changes mean that Marlin can run up to six motors. That’s great for us, because most robot arms are 6 or less.
With Marlin installed you’ll be able to control the angle of each motor by sending gcode commands and even drive them simultaneously. With Marlin’s homing routines you could locate position, and new options coming in the near future will give real time feed back (more on that later)
What needs to be tweaked
Pour yourself a drink and settle in. This list will touch at least two files and take some time… OR you can use the sixi3 branch I maintain and adjust it for your speeds and gear ratios.
I keep trying new ways to make this list less dry. What do you think?
MOTHERBOARD is your choice of brain board. Anything Mariln supports AND has 6 axies will work.
DEFAULT_AXIS_STEPS_PER_UNIT is the gear ratio at the given joint. For all sixi3 gearboxes the ratio is 70:1 (harmonic) * 54:20 (timing belt) * 200/360 (for 1.8 degree stepper motors at full step) = 105.
Because the gear ratio is so high the motors are not physically able to exceed the DEFAULT_MAX_FEEDRATE. If you use faster motors or a faster brain board you may be able to improve on these numbers.
EEPROM_SETTINGS, SDSUPPORT, and REPRAP_DISCOUNT_SMART_CONTROLLER are not required. I use these to tweak settings for testing, run programs from the SD card, and to have an LCD panel on my robot.
Every other change is to adjust from 3 axies to 6.
Homing and Real time feedback
There are some exciting new features coming to Marlin that should make real time feedback possible. This means we’ll know the robot position without having to guess or to home. It also means we can tell when the actual position deviates from the expected position too much that a collision has occurred and that can save a lot of trouble! The new configuration options to explore are:
REALTIME_REPORTING_COMMANDS adds some “quick commands” that get processed before anything else in the gcode buffer of the robot. Great for emergency breaking and for requesting position information (Gcode “S000”)
M114_REALTIME adds “M114 R” which reports the real-time position of the robot instead of the projected position at the end of the planned moves.
I2C_POSITION_ENCODERS is a first pass at adding real time sensors. This will no doubt be expanded later to include other types and features.
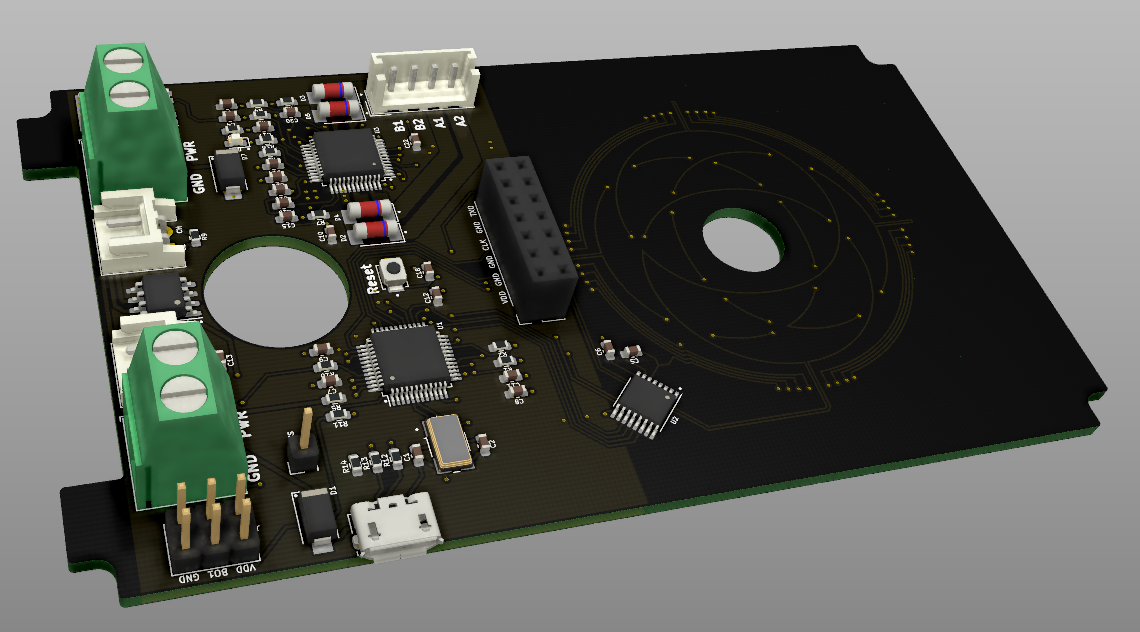
Daisy Stepper Driver is a closed-loop stepper controller that can be daisy-chained.
A stepper controller is a dual h-bridge circuit for controlling a stepper motor. You may be familiar with the A4988 stepper driver common in 2020s 3D printers. This board includes a more advanced model of the same. It can drive any one stepper motor at 24V up to 2A.
Closed-loop means that the board has a brain chip (MCU) that can read the motor position as well as direct. This way it can tell if it missed a step, bumped into something, is being driven, etc.
Daisy-chained means that they can be hooked sequentially. Sequential wires are much shorter. Shorter wires make for easier construction and repair. They are designed for up to 6 Daisies in a row. The Daisies talk to each other via the CANopen protocol.
The MCU is an STM32F103. In speaks CANopen natively while driving the stepper and listening to the sensor.
The CANopen master at the base of the robot can be any MCU that speaks CANopen. It synchronizes each motor and provides a single USB or bluetooth serial connection to the world.
What does this have to do with robots?
This board is designed to fit inside each gearbox of the Sixi 3 robot arm.
The old way a wire from every part had to run all the way through the arm and out the base. To replace the second joint from the bottom you would have to dismantle the entire arm. In the daisy chain model you only need to remove the elbow and disconnect the two cables to the next link in the chain.
Here’s a video of the arm moving IRL. Note the large cable hanging off the side – this version does not have the board in yet. It is the “outside” version of the wiring. I live in constant anxiety that they will get caught on something while moving.
Editor’s note – in this video one motor misbehaves. It was later found that the motor was negative 400-steps per turn instead of the expected 200-steps-per-turn.
Why isn’t the board in already?!
To test the board I have to be able to program it. To program the STM32F103 MCU I need to flash it with a bootloader via the programming pin J6. I have an STLINK V3 MINI to flash the bootloader BUT the MINI has male pins at 1.25mm pitch and my board’s J6 is 2.5mm pitch.
Assuming this board is good and can be programmed… the next tasks are:
mount the board in the actuator
attach the disc to the output of the gearbox
run wires from one to the next and test the daisy chain
get an appropriate brain board and drive everything synchronously
make more boards
At the last stage it will be time to go to Kickstarter to scale production and bring the price down.
Did you design this board yourself?
No, and I’m proud of it! I have played with KiCAD in the past and done a few but this was beyond my skill. I found a great EE on Fiverr, gave him my specs, and he routed everything in a couple of days. Truly blown away by his skill. He even had a PDF step-by-step guide for ordering from PCBWay so I didn’t have to assemble the board or nothing.
Sadly, he closed his account and I have no way to reach him any more. Electroniikka! If you’re out there, know that I want to work with you again. I love working with talented people, it’s fun, easy, and it helps me scale up to the speed I long for.
This week I’ve done a lot to make driving the Sixi 3 arm easier.
You’ll recall from FF1 that I had build a Panel to talk to a robot in Javax Swing.
TextInterfaceToListeners (at the bottom) was the starting point. Then I made a ConversationHistoryList (in the middle). The two are tied togeter in a TextInterfaceWithHistory, such that hitting send copies the message to the history and clicking a line in the history copies it to the input field. Next I made a ChooseConnectionPanel (at the top) and attached that to the TextInterfaceWithHistory inside a TextInterfaceToNetworkSession. Sure, it could have all been in one giant class… but that’s hard to manage, debug, or reuse.
Having made all that, I found it was no better than the existing Arduino serial interface for talking to the robot. My biggest worry is that I make a typo and send the robot crashing through the table before I can hit the emergency stop. So to address this pain point, I needed a way to drive more intuitively.
The Dial
The Dial is drawn to scale whatever size you need. It listens for scrolling of the mouse wheel. Other classes can subscribe to get ActionEvents when the dial moves. This way the dial is loosely coupled and can be reused all over the place. For example,
Angle Driving
Using the dial I built a panel that is initialized with a virtual sixi3 robot.
The radio buttons on the left are pulled from the robot model. The AngleDriving system listens to the dial. When the Dial moves then AngleDriving looks at the selected button, finds the robot joint, and tweaks it by 1 degree.
Cartesian Driving
Moving the arm one joint at a time is fine some of the time, but sometimes I need to move in a straight line. I improved the look of the Dial a little bit and made this tool to move the end effector (finger tip) of the robot arm.
XYZ are straight line moves. Roll is a twist around Z, pitch a twist around X, and yaw a twist around Y. Each of these moves happens relative to the reference frame. The options for now are world, the first joint of the robot, and the end effector itself.
Read-only panels
Once I had that I needed more ways to visualize what the system was doing. The two types I made are the AngleReportPanel,
And the various matrix reports.
Each of these listens to the robot reporting a change to the end effector position.
Cartesian Driving with Jacobians
Big shout out to https://akintokinematics.com/ for the excellent Jupyter notebooks that helped me improve cartesian driving to work. For some time now I’ve been telling everyone how much I love Gradient Descent for moving the robot arm. Well… it turns out Gradient Descent is hard to tune and slow AF to converge on a solution, sometimes taking 30 seconds per millimeter. So, instead, based on Greer’s notes, I used the approximate Jacobian.
The approximate Jacobian is a matrix describing the relationship between joint velocity and cartesian velocity at a position. So from position A to position B have the cartesian difference {x,y,z,roll,pitch,yaw}, dAB.
I get the approximate Jacobian at A, aj.
I get the inverse or pseudoinverse of the Jacobian, aji,
Multiply aji * dAB to get is the amount to move each joint in the arm.
Apply the joint change and measure the error term.
I set up a loop to run (at most) 20 times. In practical terms it never seems to run more than 2 or 3 per step, and feels blazing fast.
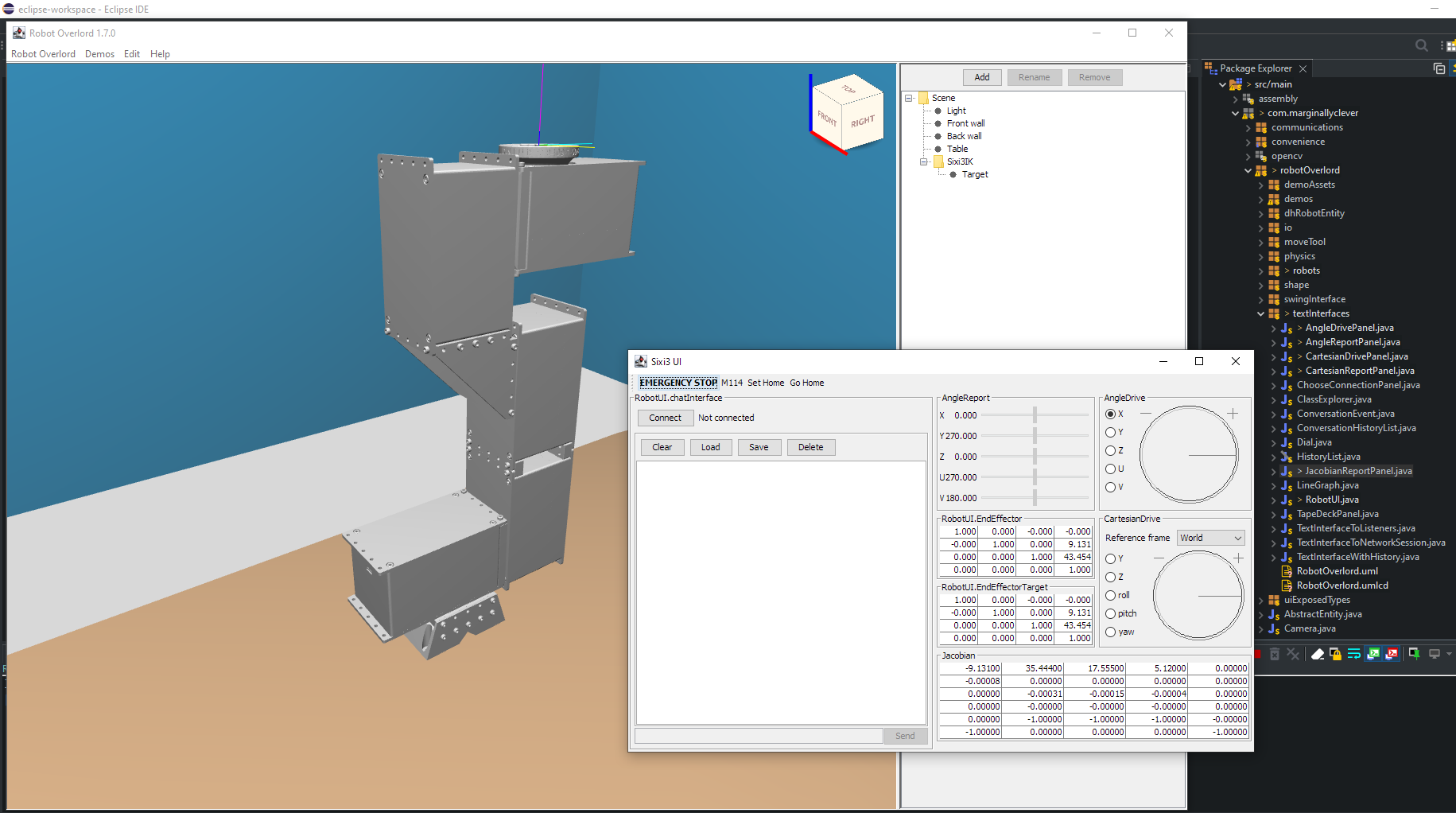
Putting it all together
If you run the development version of Robot Overlord today and use Demos > Sixi 3 you’ll get this view and be able to drive the virtual robot by playing with the controls. Tweaking the dials moves the virtual robot. Sixi 3 UI listens for those changes and sends them through the RobotUI.chatInterface so they show up in the history and they move the real machine (if connected).
My next Thing is figuring out a nice way to run programs: loops, sequences, patterns, wait for signal, send signal, conditionals, and so on. The virtual robot does not know anything about gcode and my gut says it would be a really big mess to spread gcode around the app. I would love to jazz with you about this and find a Good Way to achieve the Thing.