An ISO compliant Sixi hand
A good designer and leader knows when to say “no”. In today’s example… I have tried several times with the help of Instagram friends and my own employees to build a gripper that we can use with the Sixi robot. I decided, finally, to say No. We’re in the robot arm business, not the gripper business. If that’s true then how will Sixi hold grippers made by other people?
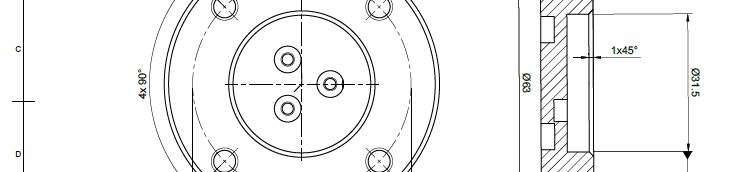
“ISO 9409-1:2004 defines the main dimensions, designation and marking for a circular plate as mechanical interface. It is intended to ensure the exchangeability and to keep the orientation of hand-mounted end effectors.”
https://www.iso.org/standard/36578.html
DIN-EN-ISO-9409-1-50-4-M6-Drawing-v3Download
Are you looking for a challenge? How about making a gripper that works with our STL model of the hand? Then it should work with all commercial robot arms that match the standard, too.
Here’s a link to the DIN EN ISO 9409-1-50-4-M6 STL file.
