I’m putting together a 2 stage 20:1 Cycloid Gearbox that’s designed in Fusion360 and 3D printed on a Prusa Mini. The motor is a NEMA17 with about 30Ncm torque. As I go I’m explaining some design features and areas to improve. I hope this is fun and educational for you. If you find this useful, please caress that like button and show it to a friend.
I try to make these gearboxes because I have yet to find someone that can make the gearbox I want. If you are that someone, ping me.
Mad love for Levi Janssen’s video about cycloid design in Fusion360. I don’t remember who first suggested to me to use the mounting screws in this way, but to you I say thank you! Very interesting!
Makelangelo is a wall hanging, mural drawing machine. There is a motor on the top left and top right of the wall, and belts hang down from there to the pen. Tension caused by gravity keeps the belt on the pulley.
To draw on the entire wall you need a belt long enough for the pen to reach the bottom corners, going diagonally across the drawing area. That means if the pen were to be in the middle and drop all the way to the bottom it would hit the floor.
Problem
When the machine tries to find home by touching limit switches, the pen holder hits the floor as described. Gravity stops, tension is lost, and the machine becomes confused.
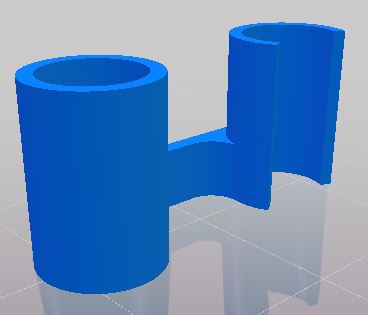
Solution
This 3D printed tensioner fits a roller skate bearing (8x22x7) and holds the bearing against the belt, gently pinching it against the pulley. This prevents skipping and allows large machines to find home.
This has an added bonus of letting the machine accelerate faster without skipping.
Print two (one for each bearing) and then fit them onto the two corners and enjoy!
we used your gcodeCNCdemo to power our 3d printed robot arm.
Print time : 80+ hours
programming time : 10 minutes
Next thing you know they’ll upgrade to Evil Minion firmware so they can drive it from Robot Overlord – and we’re looking forward to it!
As we’ve said for years, affordable robot arms are the next step. Marginally Clever wants to make that future get here quicker. Part of that plan is we’ve been giving away the code to make it happen. We’ve also designed our own arms, and we’re looking to help other talented robot arm designers. We want to work with anyone else who dreams like we do.
I’m slugging my way through the end of a project and I needed something to take my mind off it for a bit so I found my first vanity 3D print – a KUKA KR180 robot arm. This scale model is fully articulated. I used an M3 screw with the head cut off to hold the wrist onto the elbow without sacrificing movement. You can get all the files on thingiverse but I found I needed to fix a number of broken meshes. To save you time, here are all the files for KUKA KR180 including the fixes. A couple more M3s will hold the rest of the parts together and I used some hot glue to hold the two halves of the humerus together. I really find this model inspiring, I hope one day soon to build my own.