In this video I’ll show you how to model straight GT2-6 timing belt and how to model continuous belt around two pulleys in a plane.
The centre to centre distance
When modelling a belt around two pulleys we have a few constraints:
the pitch circumference of each pulley
the pitch of the timing belt
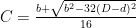
What we need is the ideal distance between the centre of the two pulleys so that the belt fits perfectly. The centre to centre distance is described as
C = center to center distance
D = diameter of pitch circle of gear 1
d = diameter of pitch circle of gear 2
b =
L = pitch of timing belt
For Fusion 360 you may find that it is easier to break the large equation into smaller sections like calculating ‘b’ first.
Final thoughts
Should I do a follow up with other kinds of belt? Other designs? Let me know.
Wouldn’t it be great if you could automate all your arduino compilations, even when the preprocessor definitions have to change? You CAN. Let me show you how.
Crush ribs are a great way to stop tweaking files per-printer and still get that snug fit you need for good mechanisms. Here’s a short video explaining the why, the where from, the how, and more.
Also, here’s a follow up tip about how to make crush ribs draft quick fast.
I thought that the hard part would be making the Six robot arm. Turns out making a two finger gripper is also pretty challenging! I would love to see students take on this challenge to make their own gripper. There’s so many ways to tackle the challenge.