Building an Open Source 3DOF Palletizing Robot Part 7: Training Software
Arm3 robot trainer is coming along. There were several false starts until I figured out the right way to get Swing and OpenGL to play nice together in Java.
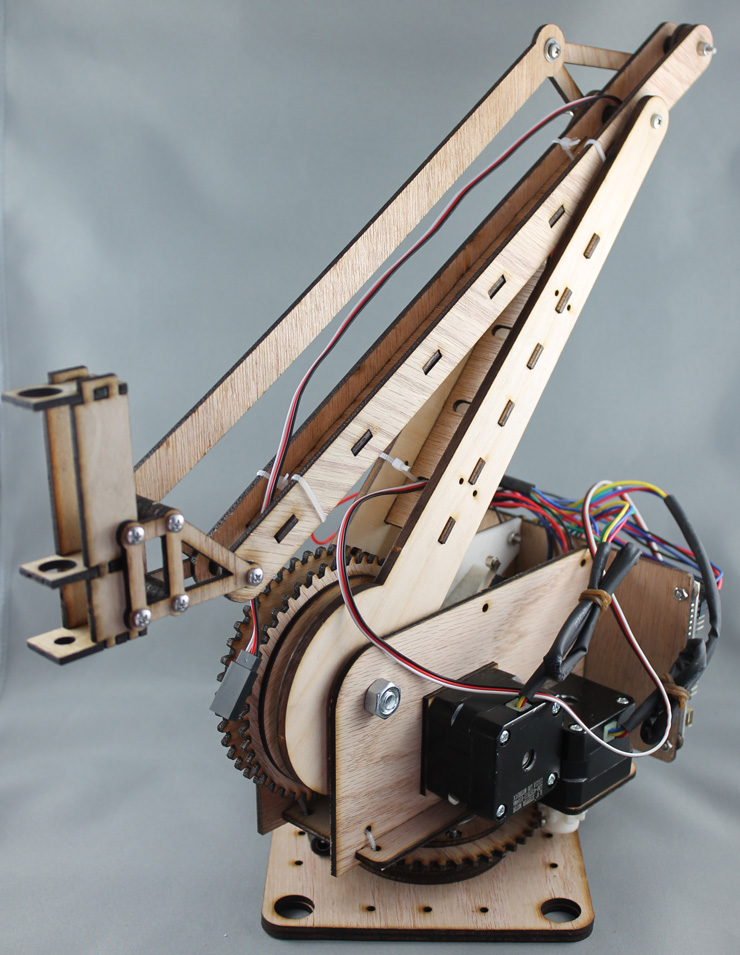
In this proof-of-concept the real machine moves to match the virtual model. The robot already understands Inverse Kinematics so there are two ways to drive the machine: the first is to move along XYZ lines and the IK system figures out how to match your request. The second is to move the motors directly. A trainer can use either one or both at once.
Next step is to record & play back sessions. Once that’s been achieved people can share training sessions with each other online – remix, tweak, collaborate, use github, and so on.
I’m looking for resellers and people who are interested in using this robot to solving real world problems. I’m also getting ready for the San Mateo Maker Faire & MakerCon. Will I see you there? We should meet up and talk shop.


