Tutorials
Micromouse maze solving with Processing and the Right Hand Rule
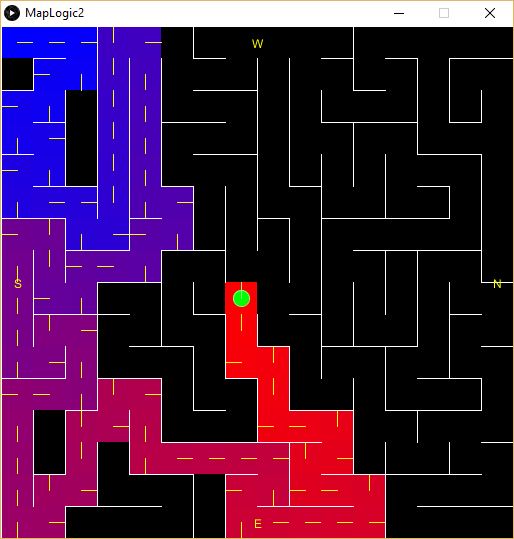
In previous posts I’ve shown you the micromouse maze that I’m building, as well as the micromouse robot. Today I’m going to show you the maze solving code I’m using to find the center of a maze. Here’s a preview.




