Uncategorized
New Product: Robot arm laser cut parts
You’ve got the bearings, you’ve got a 3D printer, all you need is the laser cut parts. Cool! We’re here to help.
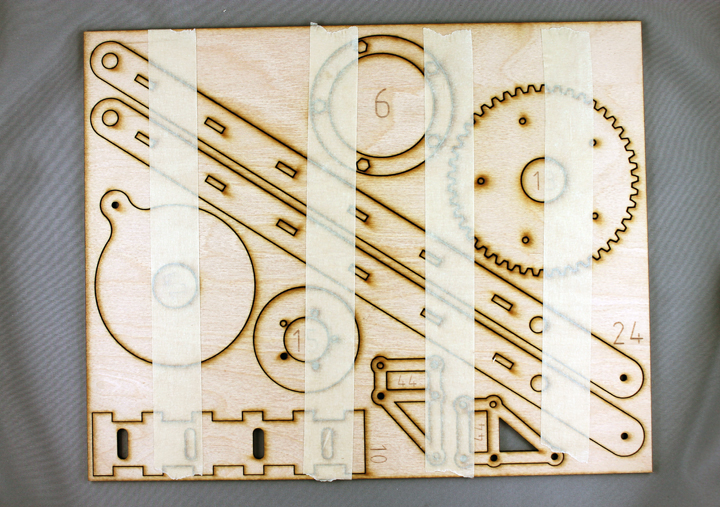
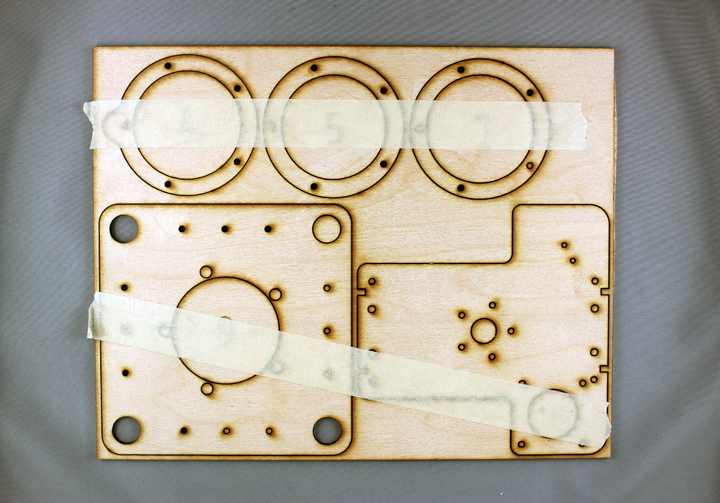
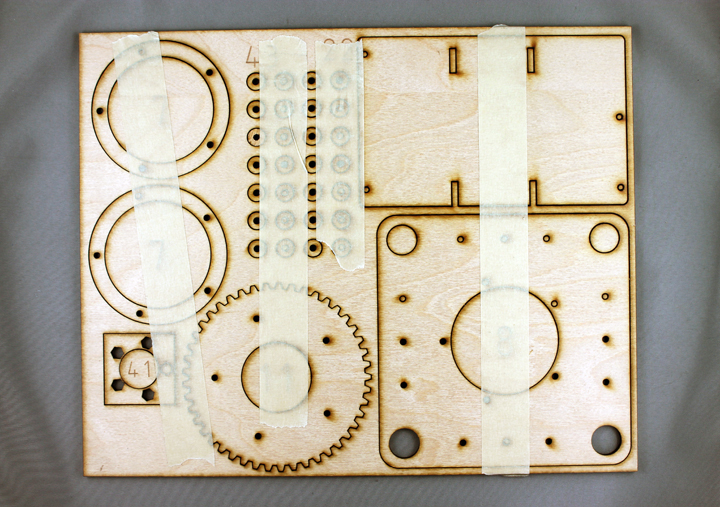
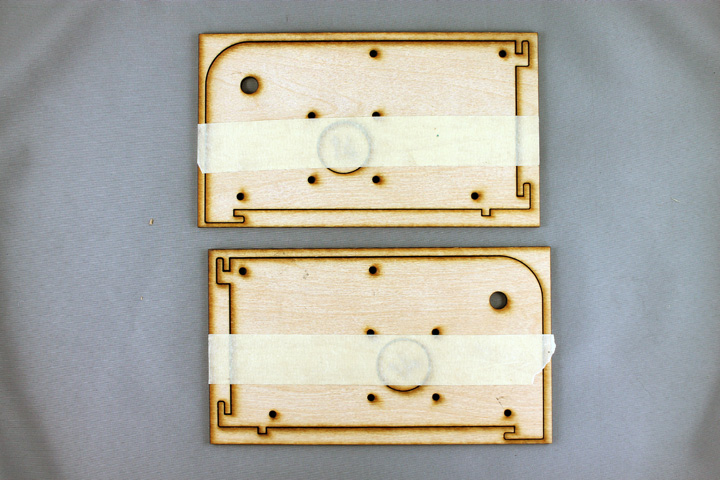
The numbers on each part match up with the Bill of Materials in the how-to document.
Order a set of parts now or Find out more about our robot arms.


