Rotary Delta Robot Forward/Inverse Kinematics Calculations
Tweak your robot dimensions and see how it will affect your work envelope and your precision. Then adjust your motor angles (thetas) or your tool position (XYZ) and see that the forward and inverse kinematics match.
We use this program to design our delta robots. If you are building a custom machine and need a consult on firmware, wiring, or mechanical parts, we'd be happy to contribute. Please contact us at Marginally Clever Software and include your numbers from this page.
Robot dimensions
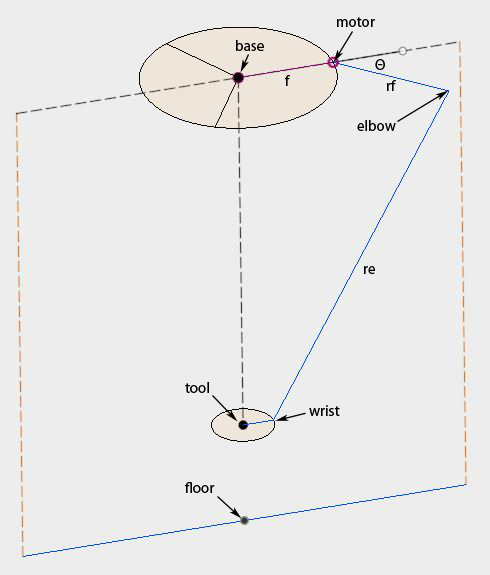
| Base radius (f) | mm | Distance from center of machine base to center of each motor shaft. |
|---|---|---|
| Bicep length (rf) | mm | Distance from motor shaft to elbow |
| Forearm length (re) | mm | Distrance from elbow to the wrist |
| End Effector radius (e) | mm | Distance from wrists to tool |
| Base to floor distance (b) | mm | Distance from floor to base |
| Steps per turn | The motor precision. 1.8 deg steppers are 200 steps per turn. At 1/16th microstepping that's 3200 steps per turn. | |
| Rectangular cuboid envelope | How big a box can the end effector reach? (end effector can actually move more than this) | |
| motor angle limits | How must the motors turn to move throughout the rectangular cuboid? | |
| Center | Where is the middle of the envelope relative to the base (0,0,0)? | |
| Home | Where is the tool when the arms are parallel to the floor? | |
| Resolution | How precise can the movements be? |
Kinematics
Forward Kinematics: Change motor angles to see new XYZ position.
Inverse Kinematics: Change XYZ to see new angles.
0 degrees is when the bicep is horizontal to the floor.
| Motor 1 | degrees |
|---|---|
| Motor 2 | degrees |
| Motor 3 | degrees |
| X | mm |
| Y | mm |
| Z | mm |
Original equations from Trossen Robotics Forums